


Machin soudaj lazè otomatik vètikal pou yon sèl estasyon limyè ble

Espesifikasyon
| Non mak | VÈT |
| Modèl | LWA501 |
| Non pwodwi | Machin soudaj lazè |
| Itinerè Platfòm | X=400, Y=400, Z=150mm |
| Ranje Pwosesis | 350 * 350mm |
| Longèdonn lazè | 445mm |
| Maksimòm puisans lazè | 40W |
| Presizyon Repetabilite | ±0.02mm |
| Mòd Plonje | AC220V 10A 50-60HZ |
| Kalite | Machin soude |
| Kalite lazè | Lazè semi-kondiktè limyè ble |
| Kalite soude | Fil fè lazè |
| Pwa (KG) | 200 KG |
| Pwen Vann Kle yo | Otomatik |
| Kote orijin | Lachin |
| Garanti konpozan debaz yo | 1 Ane |
| Garanti | 1 Ane |
| Enspeksyon videyo k ap soti | Bay |
| Rapò Tès Machin | Bay |
| Kote choroum nan | Okenn |
| Kalite Maketing | Pwodwi òdinè |
| Kondisyon | Nouvo |
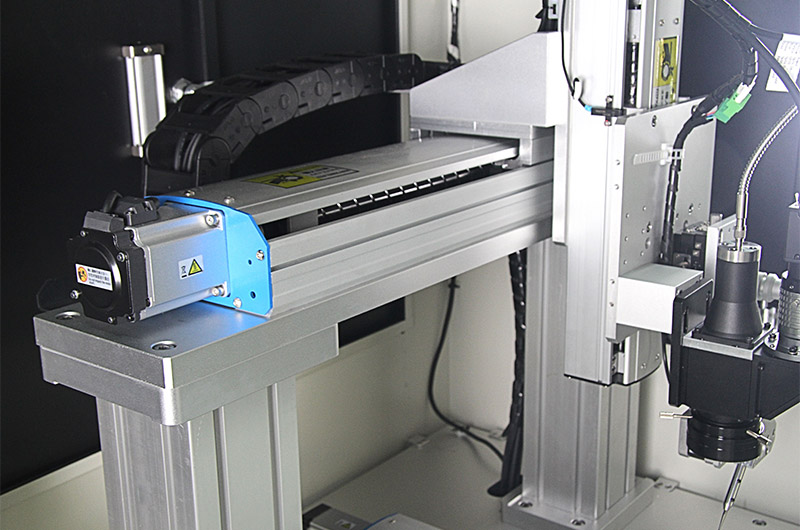
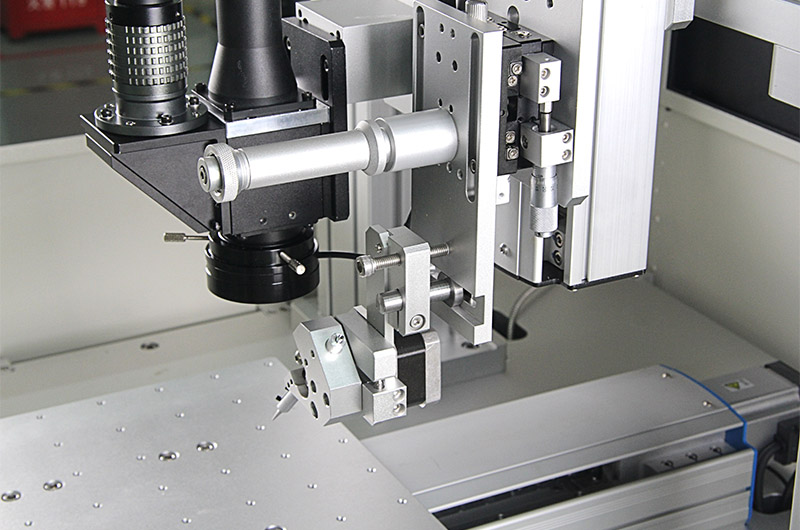
| Konpozan prensipal yo | Motè, òdinatè endistriyèl, ray gid presizyon, kamera, vis |
| Endistri Aplikab yo | Atelye Reparasyon Machin, Izin Fabrikasyon, Lòt, Endistri Kominikasyon, Endistri Elektwonik Konsomatè 3C, Endistri Otomobil, Endistri Nouvo Enèji, Endistri LED, Endistri Elektwonik |
Karakteristik
Machin soudaj lazè limyè ble GREEN LAW501 pou planche
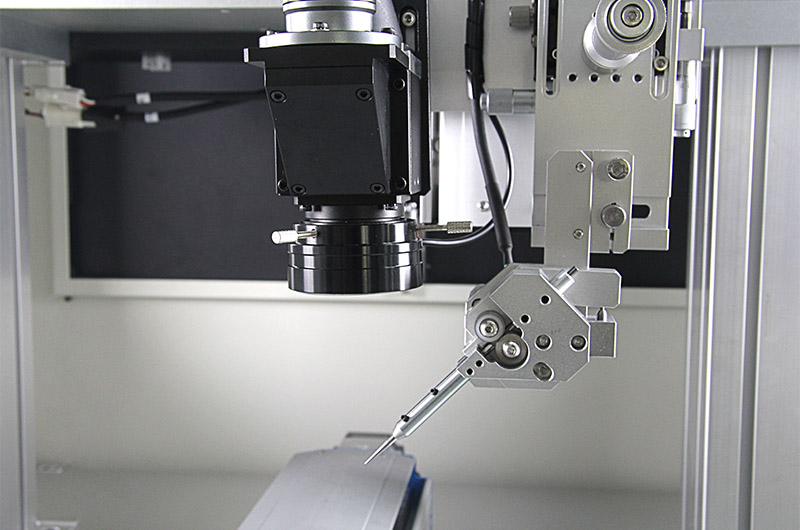
1. Segondè presizyon: tach limyè a ka rive nan nivo mikron, epi pwogram nan ka kontwole tan pwosesis la, sa ki fè presizyon an pi wo pase pwosesis soudaj tradisyonèl la.
2. Pwosesis san kontak: pwosesis soudaj la ka fini san kontak dirèk ak sifas la, kidonk pa gen okenn estrès ki koze pa soude kontak.
3. Ti bezwen espas travay: yon ti reyon lazè ranplase pwent fè soude a, epi yo fè yon pwosesis presizyon tou lè gen lòt entèferans sou sifas pyès la.
4. Ti zòn travay: chofaj lokal, zòn ki afekte pa chalè a piti.
5. Pwosesis travay la an sekirite: pa gen okenn menas elektwostatik pandan pwosesis la.
6. Pwosesis travay la pwòp e ekonomik: konsomab pou pwosesis lazè, pa gen okenn fatra ki pwodui pandan pwosesis la.
7. Operasyon ak antretyen senp: operasyon soudaj lazè a senp, antretyen tèt lazè a fasil.
8. Lavi sèvis: Lazè a ka dire omwen 10,000 èdtan, epi li ka dire lontan epi li ka fonksyone byen.
Fonksyon
Soudaj otomatik broch sou diferan aplikasyon tablo. Soudaj lazè a ka itilize pou pi diferan materyèl yo. Robo soudaj yo gen yon lazè ki fè koneksyon soude yo nan tan ki pi kout la.
Robo pwogramasyon otomatik (pwogramasyon otomatik)
Nomenklatur Espesyal: robo pwogramasyon otomatik, brûleur otomatik, pwogramè entelijan, aparèy pwogramasyon totalman otomatik, pwogramè totalman otomatik, brûleur totalman otomatik, nomenklatur espesyal sa yo aktyèlman se aparèy ki sanble (olye pwogramasyon chip manyèl. Nan pwogramè totalman otomatik la, sa ki annapre yo inifye kòm pwogramè chip totalman otomatik).
Nomenklatur Espesyal: robo pwogramasyon otomatik, brûleur otomatik, pwogramè entelijan, aparèy pwogramasyon totalman otomatik, pwogramè totalman otomatik, brûleur totalman otomatik, nomenklatur espesyal sa yo aktyèlman se aparèy ki sanble (olye pwogramasyon chip manyèl. Nan pwogramè totalman otomatik la, sa ki annapre yo inifye kòm pwogramè chip totalman otomatik).


Manadjè soudaj (pou pwent fè)
Vizyalizasyon estati operasyonèl robo a, ki gen ladan kowòdone pou chak pwen, divès kontè, tanperati pwent, elatriye.
Tout valè koreksyon yo anrejistre pa mekanis koreksyon pozisyon pwent 3 aks la, valè mezi tanperati pa UNI-TESTER, valè offset otomatik yo, rezistans tè pwent lan, ak vòltaj flit la.
Anrejistreman videyo ak done pandan soudaj amelyore trasabilite
Jesyon seri pa lekti kòd 2D
Kontwòl pwosesis mondyal posib grasa pataj done yo te jwenn yo.











